L293D Bidirectional DC Motor Control
Using PIC16f877a
Simulation files :
1. Protues design file -
DOWNLOAD
2. Hex files -
DOWNLOAD
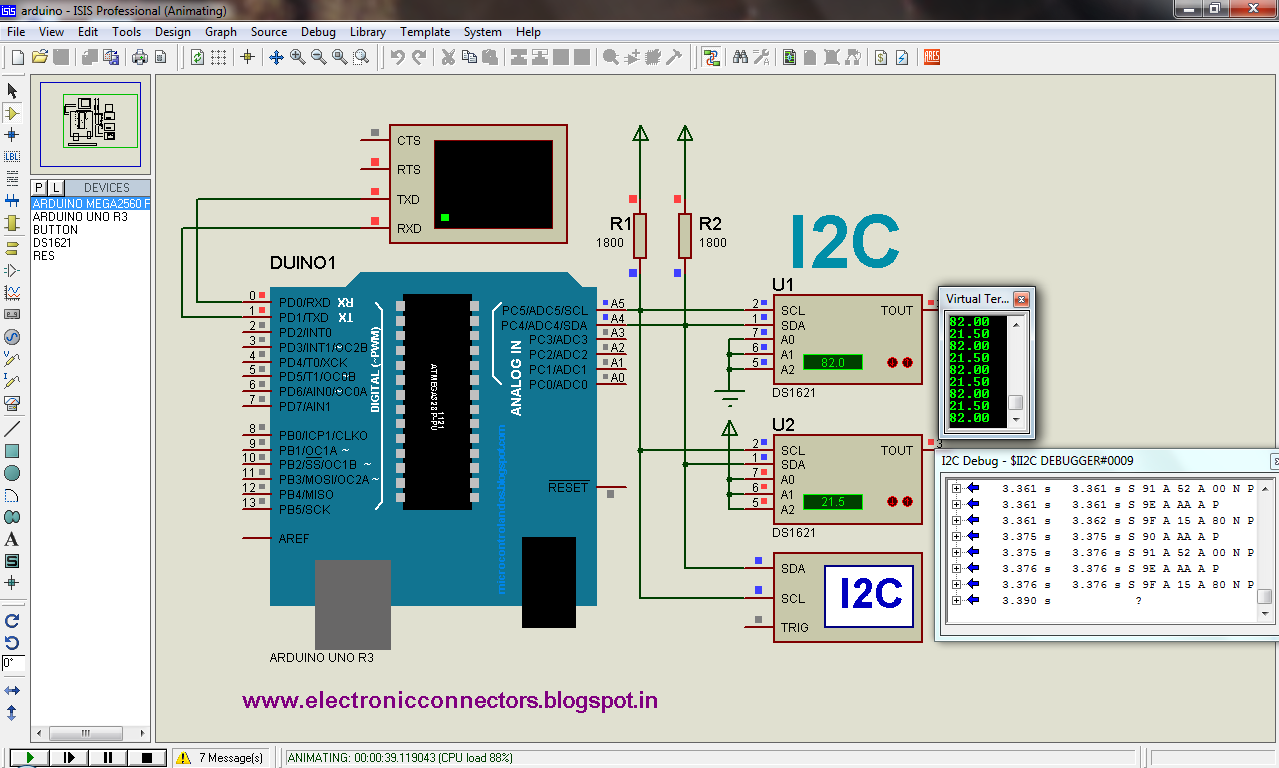
The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5 V to 36 V. Here we control two DC motors using L293D quadruple high-current half-H drivers.
with PIC16F877A micro controller . working diagram of L293D is given below
To control the speed motor we generate PWM signal from PIC , The bidirectional control of motor by high and low state other digital signal from PIC, here we use inverting of duty of pwm when changing one direction to opposite direction for maintaing the speed of motor.
signal output from virtual CRO given below

%2Bccs%2Bc%2Bcompiler%2Boutput%2Bnot%2Bworking%2Bccssc.info.PNG)